ImagePath Module¶
class Path¶
compact¶
- doc
https://pillow.readthedocs.io/en/latest/reference/ImagePath.html#PIL.ImagePath.PIL.ImagePath.Path.compact, http://effbot.org/imagingbook/imagepath.htm#tag-ImagePath.Path.compact
import math
from PIL import ImagePath
def _create_demo_imgs(xy, size):
# to clarify behaviour of compact method,
# this demo shows up 'line' version and
# 'point' version.
from PIL import Image, ImageDraw
imgp = Image.new("L", size, color=240)
dctx = ImageDraw.Draw(imgp)
dctx.point(xy)
del dctx
imgl = Image.new("L", size, color=240)
dctx = ImageDraw.Draw(imgl)
dctx.line(xy)
del dctx
return imgp, imgl
def _save_result(imgs, outfilepath):
# drawing single point on large canvas is not visible
# for human's eye, so this demo use very small canvas
# and later resize it.
size = (imgs[0].width * 8, imgs[0].height * 8)
imgs[0].resize(size).save(outfilepath + "p.jpg")
imgs[1].resize(size).save(outfilepath + "l.jpg")
#
xy = []
for x in range(0, 32, 4):
xy.extend([
(x, x // 4 * 2),
(x + 2, x // 4 * 2),
(x + 4, x // 4 * 2)])
# calculate bounding box
bb = list(map(int, map(math.ceil, ImagePath.Path(xy).getbbox())))
# with original xy
imgs = _create_demo_imgs(xy, bb[2:])
_save_result(imgs, "result/ImagePath_compact_01_1")
# compact(distance=4)
xy_c = ImagePath.Path(xy)
xy_c.compact(4) # This method modifies the path in place,
# and returns the number of points left
# in the path.
# distance is measured as Manhattan distance
# (https://en.wikipedia.org/wiki/Taxicab_geometry)
# and defaults to two pixels.
imgs = _create_demo_imgs(xy_c, bb[2:])
_save_result(imgs, "result/ImagePath_compact_01_2")
# compact(distance=4 + 2)
xy_c = ImagePath.Path(xy)
xy_c.compact(4 + 2)
imgs = _create_demo_imgs(xy_c, bb[2:])
_save_result(imgs, "result/ImagePath_compact_01_3")
|
original
 compact(distance=4)
 compact(distance=6)
 |
   |
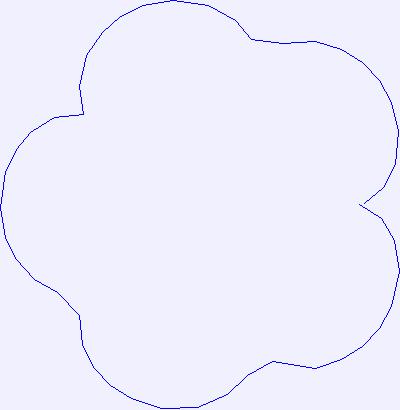
import numpy as np
from PIL import Image, ImagePath, ImageDraw
# epicycloid
rc, rm = 5, 1
th = np.linspace(0, 2 * np.pi, 360)
X = (rc + rm) * np.cos(th) - rm * np.cos(((rc + rm) / rm) * th)
Y = (rc + rm) * np.sin(th) - rm * np.sin(((rc + rm) / rm) * th)
X = (X - X.min()) * 30
Y = (Y - Y.min()) * 30
#
xy = list(zip(X, Y))
ipath = ImagePath.Path(xy)
bb = list(map(int, map(np.ceil, ipath.getbbox())))
# original path
img = Image.new("RGB", bb[2:], color="#f0f0ff")
dctx = ImageDraw.Draw(img)
dctx.line(ipath, fill="blue")
del dctx
img.save("result/ImagePath_compact_02_0.jpg")
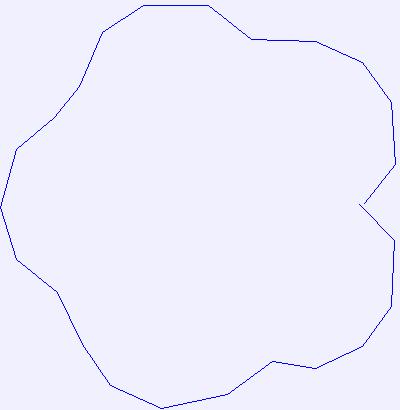
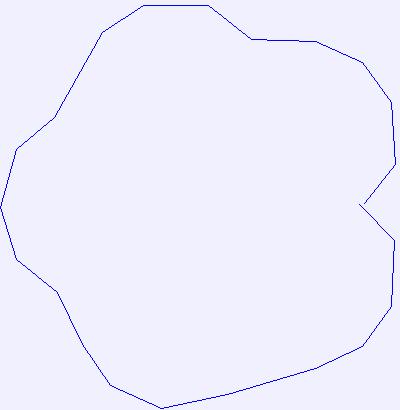
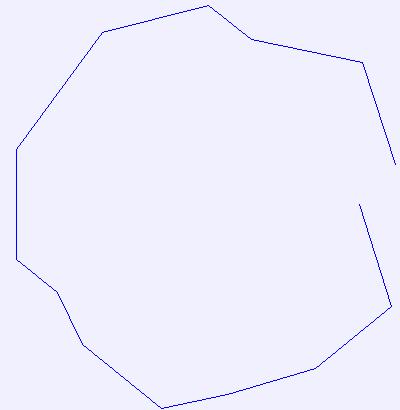
# compact (repeat)
for i in range(5):
img = Image.new("RGB", bb[2:], color="#f0f0ff")
dctx = ImageDraw.Draw(img)
ipath.compact((i + 1) * 15) # modifies the path in place
dctx.line(ipath, fill="blue")
del dctx
img.save("result/ImagePath_compact_02_%d.jpg" % i)
original
 |
compact
 |
more compact
 |
more compact
 |
more compact
 |
getbbox¶
- doc
https://pillow.readthedocs.io/en/latest/reference/ImagePath.html#PIL.ImagePath.PIL.ImagePath.Path.getbbox, http://effbot.org/imagingbook/imagepath.htm#tag-ImagePath.Path.getbbox
>>> import math
>>> from PIL import ImagePath
>>> # integers
... xy = list(zip(range(3, 10, 1), range(24, 5, -2)))
>>> xy
[(3, 24), (4, 22), (5, 20), (6, 18), (7, 16), (8, 14), (9, 12)]
>>> bb = ImagePath.Path(xy).getbbox()
>>> bb
(3.0, 12.0, 9.0, 24.0)
>>> list(map(int, bb))
[3, 12, 9, 24]
>>> # floating points
... xy = list(zip([i / 4. for i in range(3, 10, 1)], [i / 2. for i in range(24, 5, -2)]))
>>> xy
[(0.75, 12.0), (1.0, 11.0), (1.25, 10.0), (1.5, 9.0), (1.75, 8.0), (2.0, 7.0), (2.25, 6.0)]
>>> bb = ImagePath.Path(xy).getbbox()
>>> bb
(0.75, 6.0, 2.25, 12.0)
>>> list(map(int, map(math.floor, bb[:2]))) # (left, top)
[0, 6]
>>> list(map(int, map(math.ceil, bb[2:]))) # (right, bottom)
[3, 12]
map¶
- doc
https://pillow.readthedocs.io/en/latest/reference/ImagePath.html#PIL.ImagePath.PIL.ImagePath.Path.map, http://effbot.org/imagingbook/imagepath.htm#tag-ImagePath.Path.map
>>> from PIL import ImagePath
>>> xy = list(zip(range(3, 8, 1), range(22, 5, -2)))
>>> xy
[(3, 22), (4, 20), (5, 18), (6, 16), (7, 14)]
>>> aspath = ImagePath.Path(xy)
>>> aspath.tolist()
[(3.0, 22.0), (4.0, 20.0), (5.0, 18.0), (6.0, 16.0), (7.0, 14.0)]
>>> # map method modifies the path in place,
... aspath.map(lambda x, y: (x * 2, y * 3))
>>> aspath.tolist()
[(6.0, 66.0), (8.0, 60.0), (10.0, 54.0), (12.0, 48.0), (14.0, 42.0)]
>>> def _fun(x, y):
... return (x - 10, y - 30)
...
>>> aspath.map(_fun) # map method modifies the path in place,
>>> aspath.tolist()
[(-4.0, 36.0), (-2.0, 30.0), (0.0, 24.0), (2.0, 18.0), (4.0, 12.0)]
tolist¶
- doc
https://pillow.readthedocs.io/en/latest/reference/ImagePath.html#PIL.ImagePath.PIL.ImagePath.Path.tolist, http://effbot.org/imagingbook/imagepath.htm#tag-ImagePath.Path.tolist
>>> from PIL import ImagePath
>>> xy = list(zip(range(3, 8, 1), range(22, 5, -2)))
>>> xy
[(3, 22), (4, 20), (5, 18), (6, 16), (7, 14)]
>>> aspath = ImagePath.Path(xy)
>>> aspath.tolist()
[(3.0, 22.0), (4.0, 20.0), (5.0, 18.0), (6.0, 16.0), (7.0, 14.0)]
>>> aspath.tolist(True)
[3.0, 22.0, 4.0, 20.0, 5.0, 18.0, 6.0, 16.0, 7.0, 14.0]
transform¶
- doc
https://pillow.readthedocs.io/en/latest/reference/ImagePath.html#PIL.ImagePath.PIL.ImagePath.Path.transform, http://effbot.org/imagingbook/imagepath.htm#tag-ImagePath.Path.transform
import math
from PIL import Image, ImagePath, ImageDraw
xy = [
(0, 0),
# box with diagonal
( 50, 100), # left, top
(160, 100), # right, top
(160, 150), # right, bottom
( 50, 150), # left, bottom
( 50, 100), # left, top
(160, 150), # right, bottom
]
#
ipath = ImagePath.Path(xy)
bb = (0, 0, 210, 160)
# original path
img1 = Image.new("RGB", bb[2:], color="#f0f0ff")
dctx = ImageDraw.Draw(img1)
dctx.line(ipath, fill="blue")
del dctx
img1.save("result/ImagePath_transform_01_0.jpg")
# affine transform
theta = math.pi / 15.
ipath.transform((
math.cos(theta), math.sin(theta), 20,
-math.sin(theta), math.cos(theta), 20,
))
img2 = Image.new("RGB", bb[2:], color="#f0f0ff")
dctx = ImageDraw.Draw(img2)
dctx.line(ipath, fill="blue")
del dctx
img2.save("result/ImagePath_transform_01_1.jpg")
|
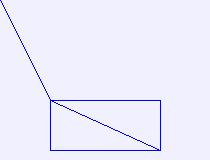 orig
|
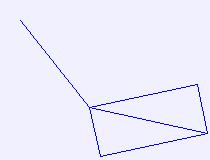 affine transform
|